Overview
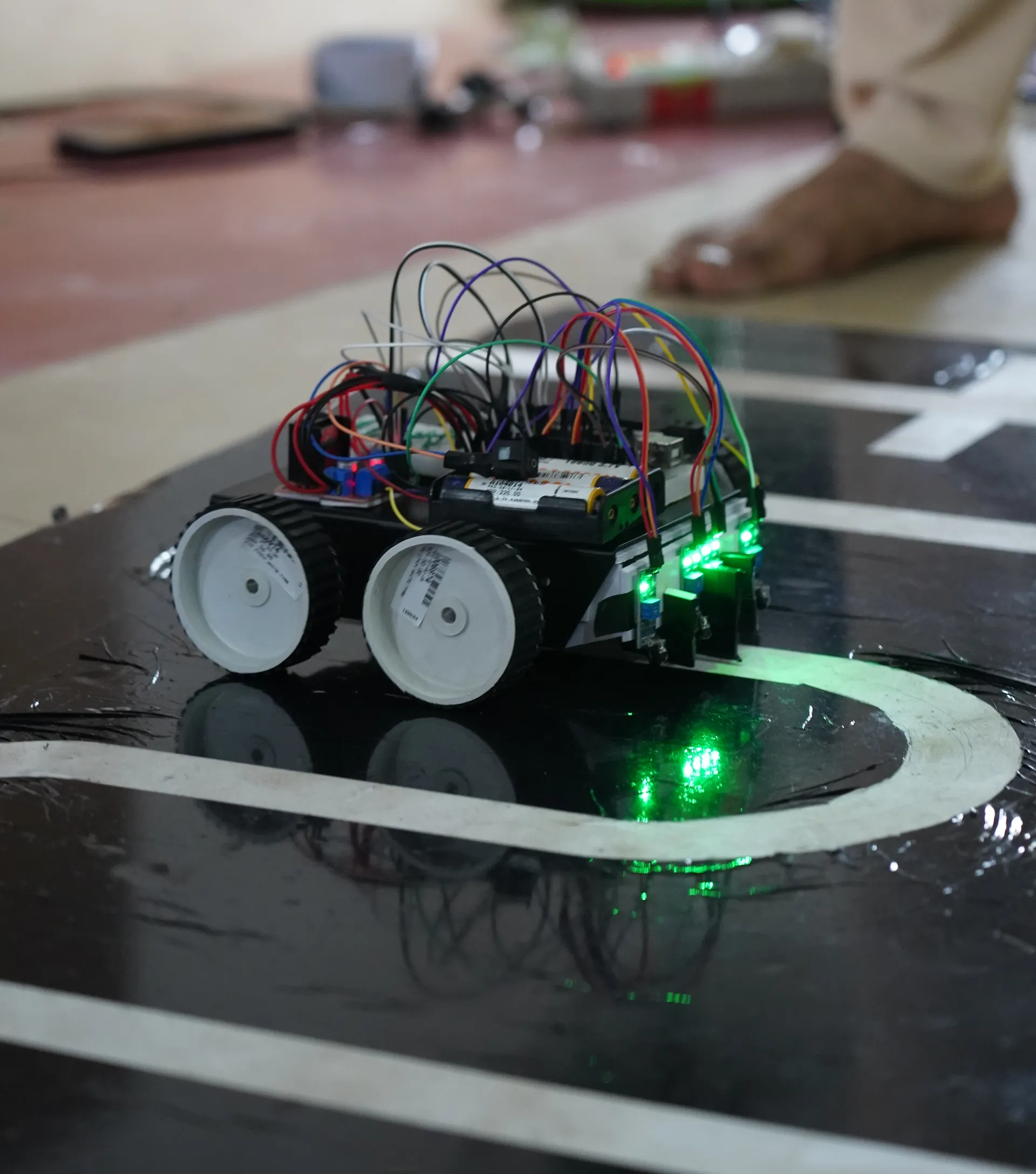
The challenge was to design and build a high-speed autonomous Line Follower Robot (LFR) from scratch in less than 18 hours. The task required rapid prototyping of hardware, precise motor calibration, and a robust control loop to navigate a complex race track under intense competition pressure.
System Architecture
The robot was developed as a distributed system with three core layers:
- Perception: An ultrasonic array (front, left, right) combined with an IR line sensor array for surface tracking.
- Decision: A finite state machine (FSM) running on the main control loop, processing raw sensor data to determine motion states (Forward, Turn, Avoid, Stop).
- Actuation: L298N dual H-bridge driving high-torque DC motors with PWM speed control for granular movement.
Implementation
The control logic utilized an FSM with specialized states for different course segments: NAVIGATE, WALL_AVOID, LINE_FOLLOW, and STOP. Transitions were triggered by real-time sensor thresholds.
A major engineering challenge was the 18-hour time limit, which necessitated a "first-time-right" approach to hardware assembly and firmware logic. High-speed stability was achieved by implementing a specialized PID control algorithm for line tracking, ensuring the robot could maintain maximum velocity on straights while cornering accurately. Additionally, calibration constants were stored in EEPROM for rapid tuning during the short testing window.
Outcome
The LFR achieved the fastest recorded lap, securing first place at the AIROB 2025 Line Follower Race. The project proved that rapid high-performance engineering is possible through efficient hardware-software co-design and optimized control algorithms.
Lessons Learned
- Sensor placement relative to chassis geometry is critical to FSM stability.
- Noise management is the primary challenge in embedded systems; early filtering pays off.
- EEPROM-backed configuration is an essential tool for rapid field deployment and debugging.